Halbfertige oder nicht beendete Projekte
Ultraschallroboter
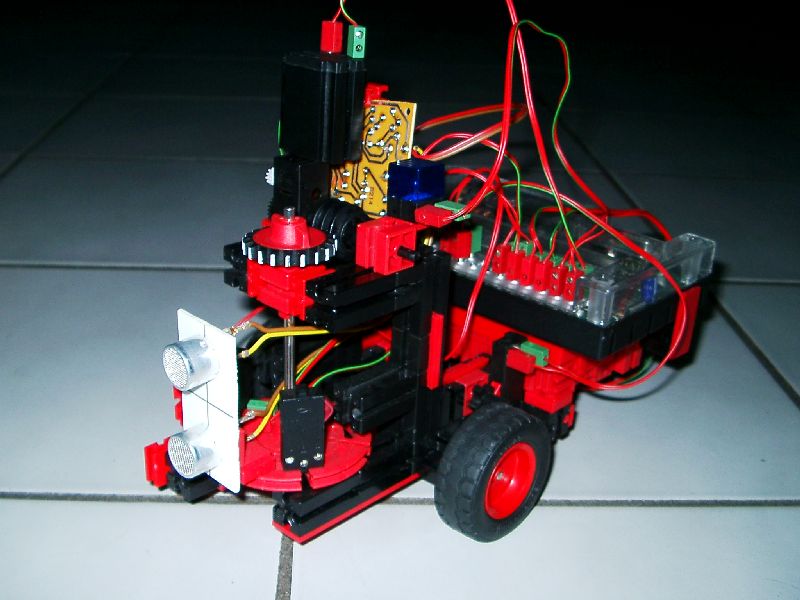

Der Ultraschallroboter sollte einen anderen Roboter oder ein Fahrzeug verfolgen. Das hat aber nie geklappt. Wahrscheinlich lag es zum einen
am Sensor selber oder an der Programmiersprache LLWin. In LLWin waren die Programmiermöglichkeiten doch sehr eingeschränkt. Mit der
neuen Programmiersprache RoboPro oder C und dem neuen Interface wäre es wahrscheinlich möglich.
Durch das hin und her Bewegen des Ultraschallsensors sollte die aktuelle Position des zu verfolgendes Fahrzeuges ermittelt werden. Dazu waren
die Zacken an einem Zahnrad (im Bild gut zu sehen) mit Tippex weiß markiert. Über einen Sensor, den CNY70, wurde dir Bewegung des Zahnrads
erfasst. Somit hat man alle Informationen um den Weg zu korrigieren. Theoretisch...
Farbsortierer
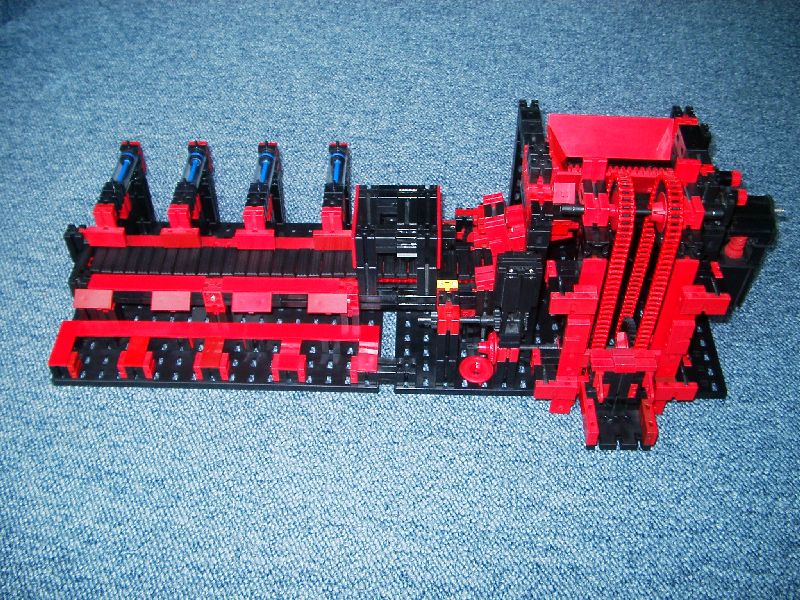
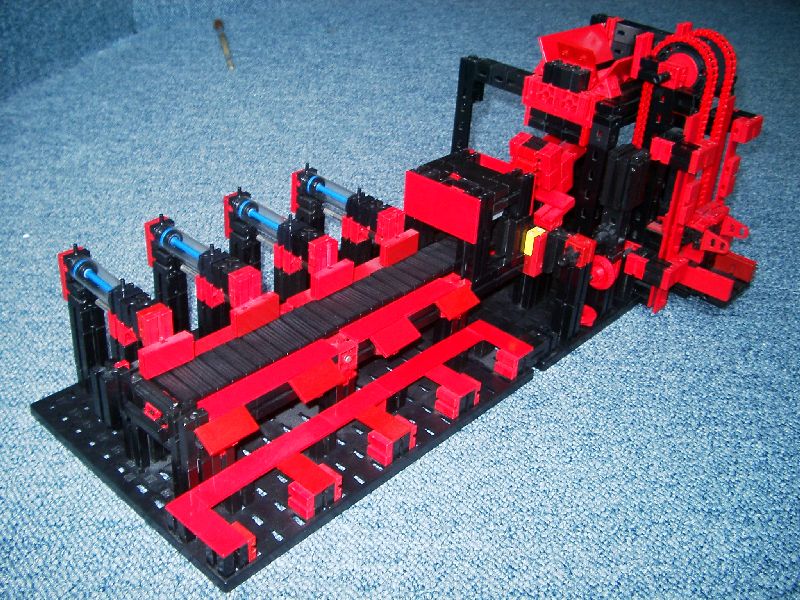
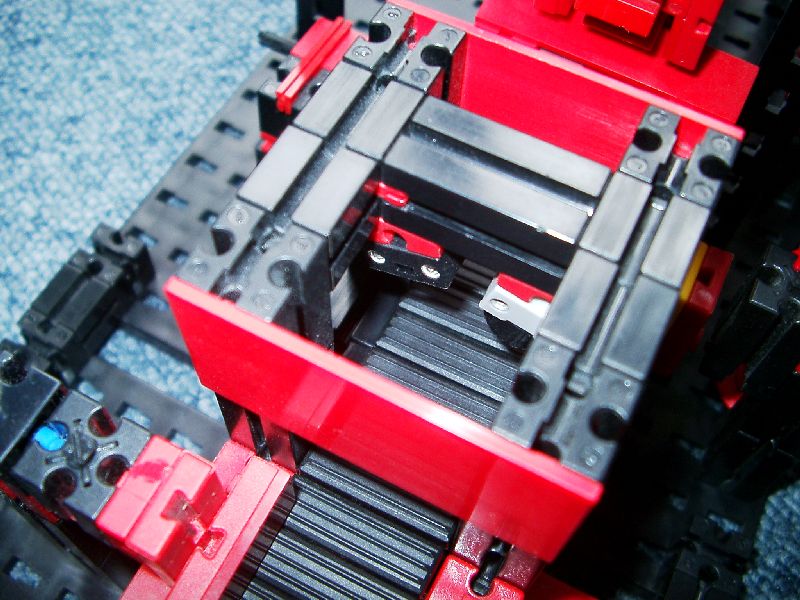
Das sollte mal ein Farbsortierer werden, der 5 verschiedene Farben über eine Fotowiderstand erkennen und die dann über Pneumatic Zylinder
in entsprechende Fässer befürdern sollte. Der ist nie fertig geworden, da ich keine elektrischen Pneumatic Ventile habe bzw. die Fremdventile
noch nicht ft kompatibel gemacht habe. Dazu kam noch, dass das Interface von einem anderen Modell belegt war. Der wird aber nochmal aufgebaut.
5- oder 6-Achsen Roboter
Das soll mal ein 5 oder 6 Achsen Roboter werden. Später soll er die vollen Behäter des Farbsortieres wieder entleeren.