Mit einem Ulraschallsensor kann man Entfernungen messen. Bei diesem bausatz wird über ein Poti geregelt, bei welcher Entfernung die LED angeht. In diesem Fall geht aber keine LED an, sondern der Optokopler schaltet durch. Die Konstruktion mit dem Optokopler hat den Vorteil, dass man irgendeine Stromquelle, die 9 bis 12 V liefert, für den Sensor nehmen kann. Mit Hilfe des Sensors kann dann ein mobieler Roboter einem Hindernis ausweichen, ohne es anfahren zu müssen. Mit zwei solcher Sensoren könnte er auch einem Hindernis folgen. Evtl. geht sowas auch mit einem, aber daran bin ich gescheitert. :-(
Was man dazu braucht:
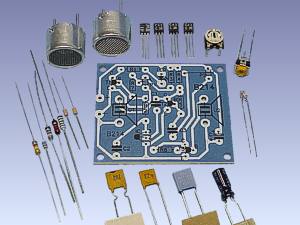
- einen Ultraschallabstandswarnerbausatz
- einen Optokopler (in diesem Fall ein CNY 17)
- Kabel
- irgendeine Platte wo wir Sender und Empfänger drauf befestigen
- Kneifzange und
Lötkolben
 Als allererstes muss man sich (irgendwie logisch, oder?) einen Ultraschallabstandswarner besorgen. Den gibt es z.b. bei Conrad unter der Bestellnummer: 11 44 56-77 für 9,95 €. Bei Pollin gibt es das unter der Bestellnummer 580 014 für 7,95 €.
Als allererstes muss man sich (irgendwie logisch, oder?) einen Ultraschallabstandswarner besorgen. Den gibt es z.b. bei Conrad unter der Bestellnummer: 11 44 56-77 für 9,95 €. Bei Pollin gibt es das unter der Bestellnummer 580 014 für 7,95 €.
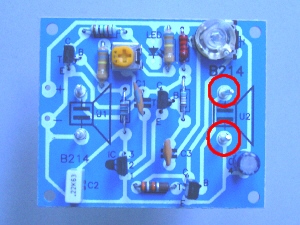 Jetzt lötet man den Bausatz bis auf die LED, Sender und Empfänger zusammen. Anstelle des Senders und Empfängers werden zwei kleine
Metallstifte festgelötet. Danach sollte es so wie auf dem Bild rechts aussehen. Zwei Metallstifte habe ich mal rot umkringelt.
Jetzt lötet man den Bausatz bis auf die LED, Sender und Empfänger zusammen. Anstelle des Senders und Empfängers werden zwei kleine
Metallstifte festgelötet. Danach sollte es so wie auf dem Bild rechts aussehen. Zwei Metallstifte habe ich mal rot umkringelt.
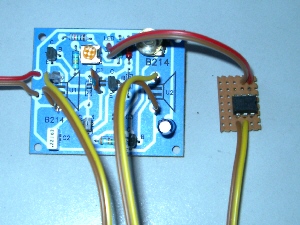 Als nächstes wird der Optokopler auf eine kleine Streifenplatine gelötet. Am besten so, dass er quer zu den Streifen ist, weil dann kann man von unter die Leiterbahnen zwischen den einzelnen Pins sehr leicht unterbrechen.
Als nächstes wird der Optokopler auf eine kleine Streifenplatine gelötet. Am besten so, dass er quer zu den Streifen ist, weil dann kann man von unter die Leiterbahnen zwischen den einzelnen Pins sehr leicht unterbrechen.
Auf dem rechten Bild gehen die Leiterbahnen der Platine von oben nach unten und sind quer unter dem Optokopler unterbrochen.
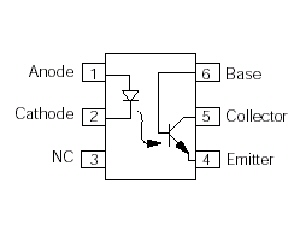 Auf dem rechten Bild ist die Pinbelegung von dem Optokopler zu sehen. Pin eins und Pin zwei werden mit dem LED Anschluss der Platine verbunden. An Pin eins (Anode)
kommt der Pluspol der LED von der Platine und an Pin zwei (Cathode) kommt der Minuspol der LED von der Platine. Pin fünf und vier werden mit irgendeinem Eingang des
Interfaces verbunden.
Auf dem rechten Bild ist die Pinbelegung von dem Optokopler zu sehen. Pin eins und Pin zwei werden mit dem LED Anschluss der Platine verbunden. An Pin eins (Anode)
kommt der Pluspol der LED von der Platine und an Pin zwei (Cathode) kommt der Minuspol der LED von der Platine. Pin fünf und vier werden mit irgendeinem Eingang des
Interfaces verbunden.
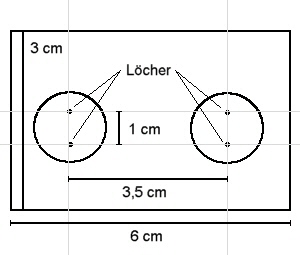 Jetzt nimmt man irgendeine Platte, ich habe eine Plastikplatte genommen, und bohrt da Löcher für die Pinne des Senders und Empfängers hinein. Am besten
nimmt man die maße der Platine. Also zwei Löcher in einem Abstand von 1 cm für den Sender. Von dem Mittelpunkt des Senders
zum Mittelpunkt des Empfängers sind es 3,5 cm. Also werden die Löcher fü den Empfänger in dem entsprechenden Abstand
gebohrt. Das sollte dann so wie auf dem Plan rechts aussehen. Die Maße für die Platte an sich kann man wählen wie man möchte.
Jetzt nimmt man irgendeine Platte, ich habe eine Plastikplatte genommen, und bohrt da Löcher für die Pinne des Senders und Empfängers hinein. Am besten
nimmt man die maße der Platine. Also zwei Löcher in einem Abstand von 1 cm für den Sender. Von dem Mittelpunkt des Senders
zum Mittelpunkt des Empfängers sind es 3,5 cm. Also werden die Löcher fü den Empfänger in dem entsprechenden Abstand
gebohrt. Das sollte dann so wie auf dem Plan rechts aussehen. Die Maße für die Platte an sich kann man wählen wie man möchte.
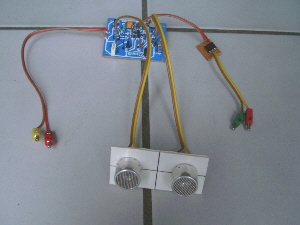 Jetzt braucht man nur noch die Gegenstücke zu den Metallstiften mit einem Kabel verbinden und an Platine, Sender und Empfänger zu stecken. Die Konstruktion mit den Metallstiften hat den Vorteil, dass man sehr einfach längere oder kürzere Kabel, je nach Modell, verwenden kann. Fertig sieht das ganze so aus:
Jetzt braucht man nur noch die Gegenstücke zu den Metallstiften mit einem Kabel verbinden und an Platine, Sender und Empfänger zu stecken. Die Konstruktion mit den Metallstiften hat den Vorteil, dass man sehr einfach längere oder kürzere Kabel, je nach Modell, verwenden kann. Fertig sieht das ganze so aus: